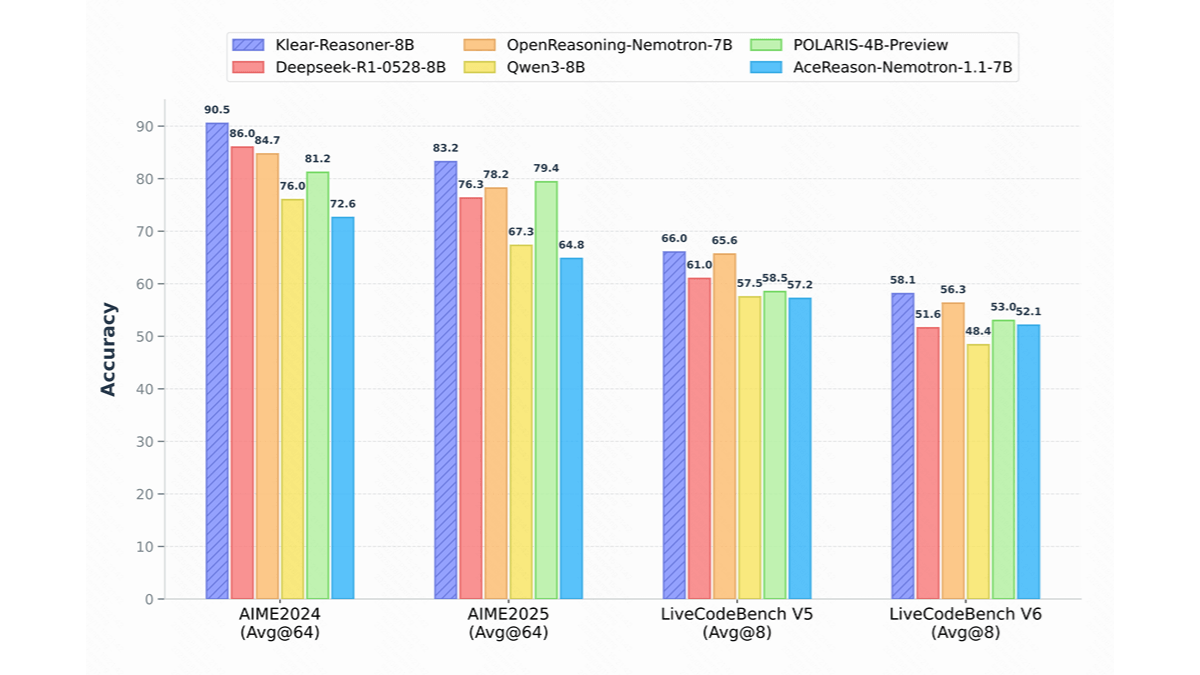
Klear-Reasoner 是快手推出的高性能推理模型,基于 Qwen3-8B-Base 进行开发。模型通过长思维链监督微调和强化学习训练,在数学和代码推理方面表现出色。Klear-Reasoner 的核心创新是 GPPO 算法,基于保留被裁剪的梯度信息,显著提升模型的探索能力和负样本的收敛速度。在 AIME 和 LiveCodeBench 等基准测试中,Klear-Reasoner 展现出卓越的性能,达到 8B 模型的顶尖水平。模型能解决复杂的数学问题,且能生成高质量的代码片段。Klear-Reasoner 广泛应用在教育、软件开发、金融科技等领域,为推理模型的发展提供宝贵的参考和复现路径。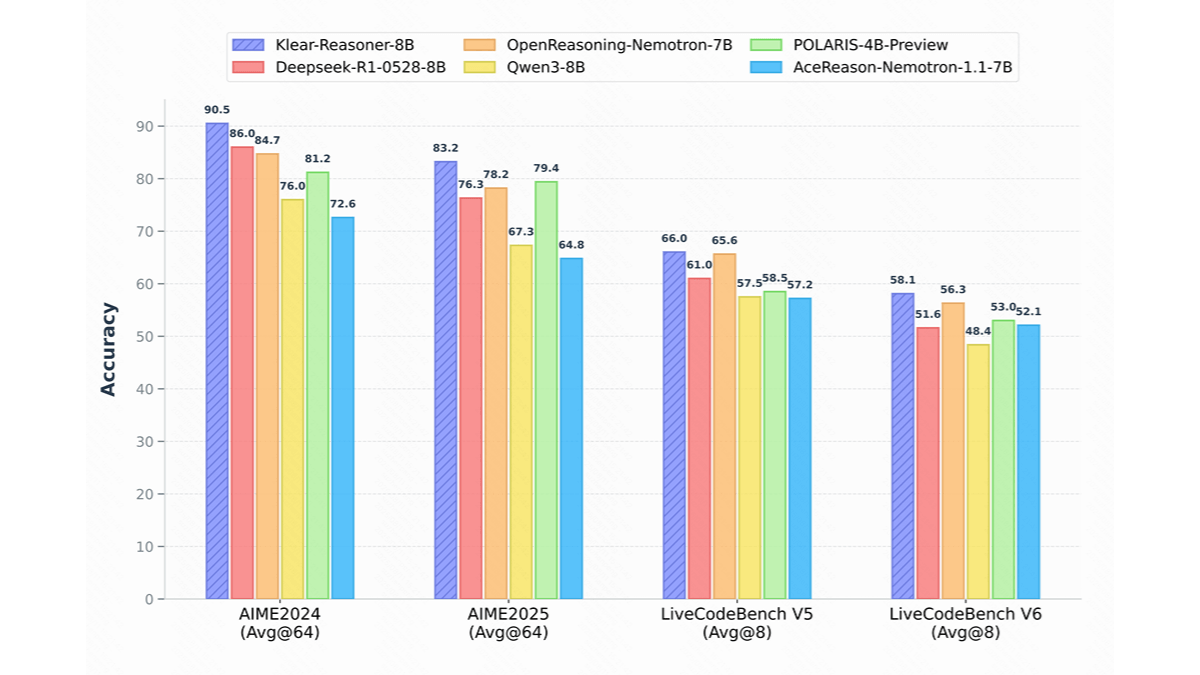
>>展开阅读
DeepSeek V3.1 是DeepSeek推出的最新开源 AI 模型,基于混合专家(MoE)架构,上下文窗口扩展至 128k,能处理更长的文本。模型在自然语言处理上表现出色,生成的创意文本生动有趣,回答问题时信息量大且语气自然。模型的编程能力显著提升,支持生成复杂度更高的代码,帮助开发者快速搭建框架。在数学和逻辑方面,模型能准确解答基础算术题,物理模拟效果更符合实际定律。DeepSeek V3.1的Base 版本已开源至 Hugging Face,能广泛应用在内容创作、编程辅助、教育和科学研究等领域。
>>展开阅读
Genie Envisioner(GE)是智元机器人团队联合新加坡国立大学、北京航空航天大学等机构开发的机器人操作统一平台。通过“先想象,后行动”的方式,让机器人更好地理解和执行任务。GE的核心包括三个部分:GE-Base、GE-Act和GE-Sim。GE-Base是一个指令驱动的视频扩散模型,能捕捉机器人在真实世界中的交互动态。GE-Act基于GE-Base,将潜在的表示转化为可执行的动作轨迹,支持不同形态的机器人。GE-Sim是一个动作条件的神经模拟器,能生成高保真的模拟视频,用于训练和评估。
>>展开阅读
Mureka V7.5 是昆仑万维推出的先进 AI 音乐生成模型,专注于中文歌曲创作。模型能精准还原音色与演奏技法,生成自然流畅且富有情感的歌声。基于优化的自动语音识别(ASR)技术,Mureka V7.5 支持分析真实演唱中的细节,精准识别唱词并捕捉情感起伏,生成更自然的人声。Mureka V7.5 能深度理解中文音乐的文化背景和艺术神韵,支持从传统民歌到流行金曲等多种风格。Mureka V7.5 能为音乐人提供高效创作工具,为影视、游戏、虚拟角色等提供定制化音乐,拓展音乐创作的边界。
>>展开阅读
Hunyuan-GameCraft 是腾讯 Hunyuan 团队开源的交互式游戏视频生成框架。框架能从单张图片和提示生成高动态的游戏视频,支持用户通过键盘和鼠标实时控制视频内容。框架将输入统一到共享的相机表示空间,实现精细的动作控制,同时用混合历史条件训练策略,确保视频的长期连贯性。借助模型蒸馏技术,显著提高推理速度,适合实时部署。Hunyuan-GameCraft在超过100款AAA游戏的海量数据上训练,生成的视频具有高视觉保真度和真实感,广泛应用在游戏视频生成、游戏测试、内容扩展及互动视频创作等领域。
>>展开阅读
DINOv3 是 Meta AI 推出的新一代自监督视觉基础模型,采用自监督学习范式,无需标注数据即可学习图像特征。通过改进数据准备和引入 Gram anchoring 解决了特征退化问题,提升了泛化能力。DINOv3 提供 ViT 和 ConvNeXt 两种骨干网络架构,其中 ViT-7B 是目前规模最大的版本,包含 67 亿参数。模型能生成高质量的密集特征表示,精准捕捉图像的局部关系和空间信息。在图像分类、目标检测、语义分割等多种视觉任务中表现出色,无需任务特定微调即可超越许多专业模型。DINOv3 支持高分辨率特征提取,适用于医学影像分析、环境监测等需要高精度特征的场景。
>>展开阅读
Genie Envisioner(GE)是智元机器人团队联合新加坡国立大学、北京航空航天大学等机构开发的机器人操作统一平台。通过“先想象,后行动”的方式,让机器人更好地理解和执行任务。GE的核心包括三个部分:GE-Base、GE-Act和GE-Sim。GE-Base是一个指令驱动的视频扩散模型,能捕捉机器人在真实世界中的交互动态。GE-Act基于GE-Base,将潜在的表示转化为可执行的动作轨迹,支持不同形态的机器人。GE-Sim是一个动作条件的神经模拟器,能生成高保真的模拟视频,用于训练和评估。
>>展开阅读
RynnRCP 是阿里达摩院开源的机器人上下文协议,能降低具身智能开发门槛并打通开发全流程。RynnRCP 包含 RCP 框架和 RobotMotion 模块。RCP 框架通过能力抽象和多协议支持,将复杂硬件接口封装为标准化服务接口,实现机器人与云平台、边缘设备的高效通信。RobotMotion 模块将低频推理命令转换为高频控制信号,确保机器人运动平滑连贯,并提供仿真、调试、数据采集等功能。RynnRCP 适用工业自动化、物流仓储、服务机器人、医疗康复、农业与环境监测等场景,助力开发者快速实现机器人应用开发。
>>展开阅读
- «
- 1
- ...
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- ...
- 24
- »